¶ Overview
The Hall sensor addon allows the automatic homing of the RA ring (once calibrated).
The addon consists of
- a hall sensor
- a single small magnet.
The sensor is mounted somewhere on the frame and the magnet is mounted on the RA ring.
The absolute position of these items does not matter much, but the magnet should be within 15 degrees of the resting (power off) position of your mount. Ideally, the magnet and sensor are in the same location (triggered) when your mount is powered off. This gives the quickest homing procedure.
A bracket is available for the sensor that sits just below the bearing on the right mount.
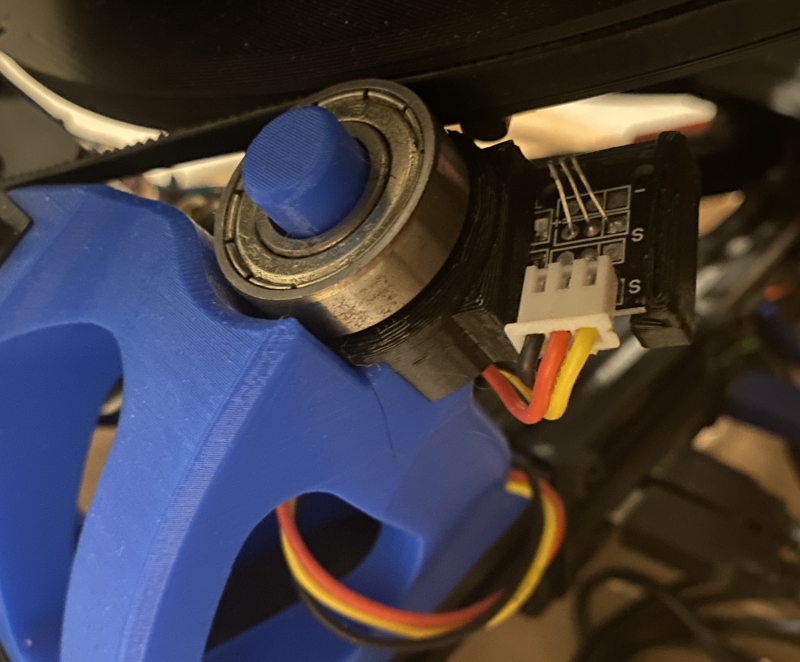
A holder for the magnet is super glued to the bottom of the RA ring.

¶ Theory of operation
OATControl is the only way to use this add on at the moment. After initiating the homing, OAT works as follows:
- OAT starts a slew of 30 degrees (2 hours) East while monitoring the hall sensor.
- If the hall sensor is encountered, it stores the position of the stepper when it is first triggered and when it has passed the sensor.
- It then slews to the middle of two positions and then slews to a user-specified offset to where the home position is from there.
- If the hall sensor is not encountered, OAT slews 60 degrees (4 hours) West while looking for the sensor. If found, behave as above, if not, homing has failed and OAT returns to the start position.
- If the hall sensor is encountered, it stores the position of the stepper when it is first triggered and when it has passed the sensor.
- If the sensor is already on when the homing starts, it slews off the sensor, reverses to find the other edge and then centers the same way as described above.
¶ Hardware
The initial prototype used was this sensor from Amazon.
For magnets, you can really use any one, but the initial prototype used one of these from Amazon.
Other sensors may work, but currently the firmware expects that the sensor to returns LOW when triggered (within range of magnet). If your sensor behaves differently, please let us know on Discord and we will make it configurable.
It's a good idea to test that the sensor behaves as expected prior to installing - several users have reported faulty sensors (inverted, latching or erratic signals)
You need to run GND and 5V as well as a signal to the sensor. It is pin 53 by default. Refer to each board wiki page for pinout diagrams.
¶ Software
The firmware does not support the homing from the LCD, only OATControl supports this. The Settings dialog is used to both calibrate and use this addon.
¶ Configuration
This feature can be enabled using the OAT Firmware Configurator.
¶ Calibration
To calibrate this:
- Connect with OATControl.
- Open the Settings dialog.
- Click on
auto-home ra. If all goes well, you will end up with the RA ring such that the magnet is centered on the hall sensor. - Close Settings and click
set home. This will zero out all the steppers. - Use the manual slew buttons (and the Rate buttons if needed) to actually center the RA ring.
- Open the Settings dialog, and click
set ra home offset. - Close the Settings dialog and click
set home.
Voila, calibrated and ready to party.
¶ Regular usage
To use this in a session:
- Connect with OATControl.
- Open Settings dialog.
- Click on
auto-home ra. - Close settings.
- Click
set home.
Ready to go.